-
在线咨询
-
-
淘宝购买
-
扫一扫
扫一扫
了解最新产品,获取产品参数协议 服务热线
服务热线0755-83995265
18922812789
- 返回顶部




扫一扫
了解最新产品,获取产品参数协议
服务热线
0755-83995265
18922812789

新闻中心
热销推荐

索尼FCB-ER9100将在第十一届深圳国际无人机展览会公开...

SONY FCB-ER9500已全面上市,主要性能特点:<br> 传感器:1/...

Sony FCB-EV9520L高清机芯模组主要特点:<br> 传感器:1/2...

SONY FCB-EW9500H主要功能特点:<br> 传感器:1/1.8英寸型...
时间:2025-04-23 15:04:13 来源: 深圳市轩展科技有限公司 浏览数: 47
2025年4月11日,国际巨头SONY推出了激光雷达(LiDAR)深度传感器,型号为AS-DT1,以全球最小最轻(29×29×31毫米,仅50克)和突破性dToF技术为核心,重新定义了工业级三维感知标准。

SONY AS-DT1,专为无人机、机器人等空间有限场景设计,结合SONY在光学镜头与工业摄像机模组领域的积累,实现了高精度、长距离与强环境适应性的完美平衡。
尽管是国际巨头SONY发布,但很多行内人士对都SONY AS-DT1不太了解,在接下来,轩展科技高级工程师Danny Wong将持续为大家做全面的普及。
1、LiDAR是什么?
SONY AS-DT1是一种激光雷达传感器,而LiDAR(Light
Detection and Ranging,光探测和测距)是一种利用激光技术进行距离测量和环境感知的主动遥感技术。其核心原理是通过发射激光脉冲并测量反射光的返回时间,计算目标物体的距离,从而生成高精度的三维点云数据。
2、LiDAR的工作原理
(1)激光脉冲发射
LiDAR系统通过激光发射器发射高频率、短脉冲的激光束(通常为905nm或1550nm波长)。激光束以光速(约30万公里/秒)传播,遇到物体后发生反射。
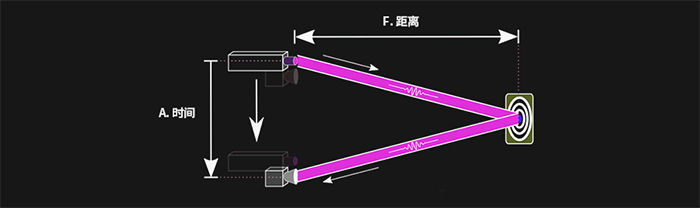
反射信号接收与测距
接收器捕获反射回来的激光信号,通过时间差测量(Time of Flight, ToF)计算目标距离,具体计算公式如下:
距离=c x t/2
其中,c为光速,t为往返时间。现代LiDAR通过相位差检测或直接飞行时间(dToF)技术实现纳秒级时间分辨率,测距精度可达厘米级。
(2)扫描与点云生成
通过扫描装置(如旋转镜、MEMS微振镜)控制激光束方向,逐点扫描目标区域。每个测距点记录三维坐标(X, Y, Z),形成点云数据,最终通过算法生成高精度三维模型。
3、dTOF是什么?
dTOF(Direct
Time-of-Flight,直接飞行时间)是一种通过测量光脉冲从发射到反射回来的时间差,来直接计算物体与传感器之间距离的技术。它与TOF(Time-of-Flight,飞行时间)和iTOF(Indirect Time-of-Flight,间接飞行时间)有着密切的联系和区别。
dTOF工作的时候,VCSEL向场景中发射脉冲激光,激光脉冲照射到物体后反射回来,被SPAD接收。TDC记录激光脉冲的发射时间和接收时间,通过计算时间差并乘以光速,得到物体与传感器之间的距离。
4、核心技术:dToF与SPAD的协同创新
(1)直接飞行时间(dToF)测距
dTOF通过测量光脉冲发射到目标反射返回的时间差计算距离,突破传统相位式测距的精度限制。
采用dTOF技术为核心的SONY AS-DT1可以在10米距离内实现±5厘米误差的高精度,室内外通用(室内40米/户外20米),抗环境光干扰能力显著提升。
(2)单光子雪崩二极管(SPAD)传感器
SONY AS-DT1利用雪崩倍增效应放大单光子信号,可捕捉微弱反射光,解决低对比度、低反射率物体(如透明玻璃、悬空障碍物)的测距难题。
鉴于以上,SONY AS-DT1可以实现0.25毫米级距离分辨率,精准区分密集物体间距,适用于仓储货架层高检测、无人机地形测绘等场景。

总结
索尼AS-DT1以突破性的dTOF技术优势,为机器人、无人机及智能硬件领域注入全新动能。其技术突破不仅解决了空间受限场景的感知瓶颈,更将推动三维视觉技术在消费级市场的普及。

周一至周五(8:30 - 18:00)节假日休息






















